Welcome to ExoLance an Explore Mars Inc. Project
a Non-Profit 501(c)(3) Organization; All contributions are tax deductible
Is there life on Mars?
We don't know, but we do know that Mars has all the elements required for life, and that all the geophysical and geochemical evidence suggests that Mars could have supported life -- and may still. Explore Mars, Inc. has a new mission concept designed to answer that question. It is called ExoLance, and it is engineered to look below the surface of Mars for current microbial life.
Why is this mission needed?
Over the past few decades, missions have been sent to Mars by space programs from around the world. Some are orbiters, some are landers, and some are rovers. From the findings of those missions, an intriguing body of evidence has been building indicating that if microbial life presently exists, it exists below the surface of Mars. While current NASA missions are looking for evidence of past life, no NASA mission is planned to look for current life. We believe this is a mistake. To find life on Mars, we actually need to look for life on Mars.
ExoLance
Concept
Explore Mars has devised a simple
system capable of being delivered to the Martian surface to detect
microorganisms living on or under the surface.
ExoLance leverages a delivery system that was originally designed for military purposes. As each small, lightweight penetrator probe ("arrow") impacts the surface, it leaves behind a radio transmitter at the surface to communicate with an orbiter, and then kinetically burrows to emplace a life-detection experiment one to two meters below the surface. ExoLance combines the experiments of the 1970s Viking landers and the Curiosity rover with bunker-busting weapons technology.
ExoLance: Preliminary Modeling for Penetration Effectiveness
Update: 1 meter depth achieved
![]()
View penetrator modeling 1 meter here
Our investigation of Mars has only scratched the
surface. Most of our data comes from
orbiting satellites. The Viking and Phoenix missions were only able to dig
several centimeters into loose sand but neither could penetrate the hard rocks
or icy material. The MER rovers had a tool that could scratch rocks, but that
was it. Curiosity is the first mission to be able to drill into hard rock and
sediment, but even it can only go a few centimeters deep.
The Mars underground remains an unexplored region. The shallowness of our present missions to
Mars are unfortunate because the underground of Mars is the best place to
search for preserved organic remains of past life. Consolidated mudstones such
as those found by Curiosity at Yellowknife Bay in Gale Crater are ideal targets
to search for preserved organics. However, radiation and oxidation can easily
destroy organics near the surface. The deeper we can go into the material, the
more likely we are to find preserved organics.
Sediments such as the Yellowknife Bay mudstones are hard - not as hard
as the volcanic rocks - but much harder than the loose soil Viking and Phoenix
dug through. Significant force, or drilling energy, is needed to penetrate
those mudstones requiring either drills or penetrators like ExoLance.
Since Curiosity drilled a few centimeters into the
Yellowknife Bay mudstone, a logical next goal would be to go an order of
magnitude deeper. Reaching a depth of 1 meter would bring us well beyond that.
It would be the first step in the subsurface exploration of Mars.
Once we have achieved the ability to reach 1 meter, and it
has been tried and tested, we can use it many places on Mars and begin the
systematic search of the Mars’ underground for signs of life.
By Dr. Christopher P. McKay, Planetary Scientist, NASA Ames Research Center
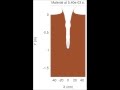
Preliminary Modeling
Aerojet Rocketdyne has been performing modeling of the Mars penetrators under internal funding as in-kind support for the ExoLance project. This work uses an industry standard simulation known as hydrocode modeling. In the hydrocode model, a grid is generated to represent the material that the penetrator is impacting and the model is run to determine the depth of penetration for various parameters such as penetrator mass, shape, initial velocity at impact and angle of entry. In order to use the hydrocode model as a design tool, it is first necessary to calibrate the model against a known test result. Since the DS-2 project did extensive testing in the 1990’s on simulated Martian soils, we elected to use it as our calibration case.
Figure 1 Figure 2
![]()
![]() Figure 1 shows the DS-2 penetrator as configured for the tests.
Figure 1 shows the DS-2 penetrator as configured for the tests.
Figure 2 shows the test set-up including the gas gun used to accelerate the penetrator to a velocity of 200 m/s at impact.
The test results for a 90 degree impact (normal to the surface) from test firing shot number 9 were as follows:
- Forebody penetration (m) 0.38
- Aftbody penetration (m) 0.2
The first movie shows the results of the preliminary hydrocode modeling. After selecting a soil composition that matched the clay type soil used in the test, the model was run with a DS-2 penetrator design and the grid mesh was adjusted until the results shown below were achieved.
90 Degree Simulation
![]()
This result shows the penetrator entering and generating a small spray of ejecta as it burrows down past 10 cm. At approximately 0.9 milliseconds, as the penetrator is passing through 10 cm, the ejecta pattern resembles a classic cratering process with a small cone forming on the surface. Of course, in the actual impact, the aftbody will be interacting with this region. One millisecond later the tunnel has reached 20 cm depth and the tunnel is now showing signs of tapering on the walls. The penetrator comes to rest at approximately 39 cm depth in approximately 10 milliseconds. This compares very favorably with the measured DS-2 results shown above.
70 Degree Simulation
![]()
A second case was run to document the sensitivity to off-nominal entrance angles. In this case, the penetrator enters at a 70 degree angle relative to the surface. As you can see from the movie, the penetration depth is reduced to approximately 25 cm. As is evident from the simulation, the penetrator body “slides” a little sideways into the soil, causing the tunnel to be wider and also reducing the ultimate depth.
Images created for Explore Mars by Bryan Versteeg
The system involves a metabolic test that clearly distinguishes non-living chemistry from the chemistry produced by the metabolism of living microorganisms . What makes this experiment even more intriguing is that if it detects life, it may also be able to determine whether that life is related to life on Earth or is a new strain of life - a separate "genesis."
Further reading for the critically discerning mind:
![]()
![]()
![]()
![]()
ExoLance Development & Testing
Within 12 -14 months of completing our $250,000 funding campaign, we will build ExoLance prototypes and test them at a test range in the New Mexico desert. Many areas of
the Mojave Desert feature Mars-like
characteristics. There, we will be able to test
both the delivery system (from an aircraft) as well as the ground penetrating arrows. These tests will verify the average depth of
penetration as well as testing the necessary parameters for a viable life detection experiment within the arrows.
Once the concept is sufficiently
tested and we have proven the viability of the mission concept, we will approach NASA, other space agencies, and potential commercial providers to carry ExoLance
on one or more future Mars missions.
Technical Team Bios
Doug McCuistion
![]()
Mr. McCuistion has more than 35 years’ experience in the aerospace industry, culminating as the Director of NASA’s Mars Exploration Program where his responsibilities encompassed all aspects of NASA’s robotic exploration of Mars, including the ground-breaking landing of the Mars Science Laboratory’s Curiosity rover on Mars in August 2012. He has held positions at NASA’s Goddard Space Flight Center as well as NASA Headquarters in management and engineering positions on missions including the Geosynchronous Operations Environmental Satellite (GOES), Landsat, Tracking and Data Relay Satellites (TDRS), and other various earth and Mars missions.
Continue Reading
Joe Cassady
![]()
Joe Cassady is a graduate of Purdue University where he majored in Aeronautics and Astronautics. He received a Bachelors Degree in 1981 and a Masters Degree in 1983. His course of study for the Masters Degree emphasized Electric Propulsion and Orbital Mechanics. While pursuing his Master’s Degree, Joe worked as a Researcher at the Air Force Rocket Propulsion Laboratory at Edwards AFB.
Continue Reading
Dr. Gilbert Levin
![]()
Gilbert V. Levin is Adjunct Professor, Beyond Center, College of Liberal Arts and Sciences, Arizona State University, Tempe, AZ. Founder of Spherix Inc. (NASDAQ SPEX) in DC, in 1967, he was CEO, President and Chair, retiring in 2008. From 1948 to 1952, Levin served successively as public health engineer in the health departments of Maryland, California and the District of Columbia.
Continue Reading
Dr. Douglas Gage
![]()
Doug Gage is an independent technology consultant based in Arlington, VA. He received his B.S. from Caltech and his Ph.D. from Arizona State University, both in Physics. After working for many years for the Navy in San Diego, principally in robotics and computer and local area networking, he moved to DARPA, where he served as a Program Manager in the Information Processing Technology Office (IPTO) from 2000 to 2004.
Continue Reading
Risks and Consequences
Exolance is a technical development activity, and any significant technical development carries technical, schedule, and budget risks. Here are a few of the issues we may encounter:
-
The volume of the selected design may not accommodate the payload (comm, science, power sys, etc.)
-
The batteries may not provide power for long enough to meet all science needs.
-
We might not penetrate as deeply as we want. (Or we might penetrate too deep!)
-
We might see higher g-loads than expected.
-
The tether may not deploy properly or it may break.
An iteration of the design should be able to mitigate each of these risks. We are very confident, because Aerojet Rocketdyne has the experience and tools to develop and validate a suitable penetrator design, and JPL's previous work on the Deep Space 2 project provides a firm basis for dealing with the full spectrum of issues likely to be encountered.
The Impact
ExoLance will literally and figuratively have an "impact." When the ExoLance penetrators arrive at the surface, they will reach depths on Mars that have never been achieved before. Most experts agree, if there is life on Mars, it will reside below the surface. If this system works, these penetrators could also carry other science payloads to Mars and the technology could be adapted for scientific purposes here on Earth. One could argue that discovering life on another planet could be the greatest impact of any fundraising campaign ever attempted - It would be one of the greatest discoveries in the history of humanity.
![]()
Explore Mars is a registered 501(c)(3) non-profit organization that has had a tremendous impact in a relatively small amount of time. The organization runs innovative STEM education programs, conferences and workshops, policy work, and has now launched new technical projects. Since Explore Mars was founded in 2010, it has run programs such as the Humans to Mars Summit which is now considered the preeminent conference advocating human exploration of Mars. In line with Explore Mars' mission it has also run extremely effective programs such as the Get Curious campaign, Mars Generation Survey, Teaching Mars workshops and Mars Education Challenge, ISS and Mars Conferences, Affording Mars Workshops, and many others. In 2014, Explore Mars has launched its first technical projects with the Time Capsule to Mars project and ExoLance.
Contingencies & Stretch Goals
In the Event we do not meet our expected goal or exceed it, this is our determined course of actions for such circumstances
$50,000: ExoLance design
$100,000-150,000: Build penetrators
$250,000: Build and test penetrator arrows - This includes computer modeling, penetrator and communications development, impact forces/factors, and initial payload configuration.
$350,000: Production of a high end film to document the project but also promote the value of search for life on Mars and sending human crews to Mars.
$500,000: Second round of EXOLANCE testing and development. This will include air drops in various analog environments.
$750,000: aggressively develop the science payload. Begin publishing papers in peer reviewed journals.
$1 Million+: At the $1 million level, we hope to achieve a Technology Readiness Level of 4 – 5. At under $10 million, Explore Mars will flight qualify the entire system.
Sponsors and Supporters
![]()
![]()
![]()
![]()
![]()